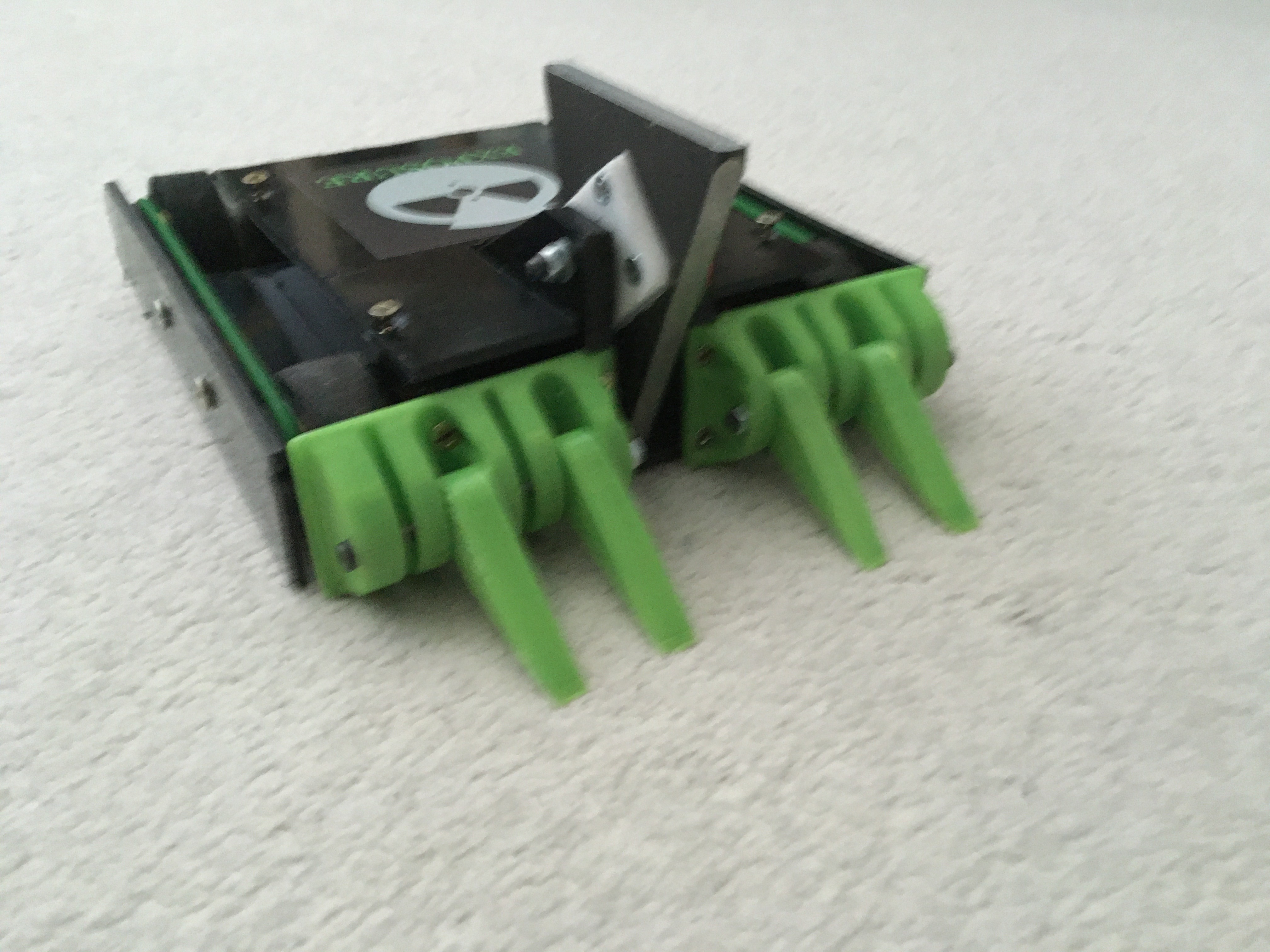
Since BBB Brawl, a lot of work has gone into this robot. This includes the purchase of an 8mm thick bar of mild steel, which was cut, by hand, into a spare weapon for testing and as a backup. The offcuts from this piece were cut and drilled into two sets of long, 8mm thick forks. The 3D printing was successfully done in high-infill green TPU, giving us the fork mounts, four wedgelets to counter drums, and the sharp edge protection for the Hardox weapons and forks, which have not yet arrived. It is unlikely that the Hardox will arrive before we leave for RoboDojo tomorrow, meaning we will have to use the mild steel weapon at the event. The preexisting HDPE wedgelets have been given an angle to save some weight and will remain as the anti-horizontal setup.
Following the wheels taking damage at Bristol, one of them has been replaced as it was slipping quite a lot and all have been given a few coats of rubber cement to improve traction. They have also been covered by wheel guards, of which we made six as they are likely to be damaged during fights. A sticker with the name of this robot, Exposure, has been made with the design of the Hardox disk on it and put on the back to easily identify it.
Testing
This test video was taken before the forks were mounted onto the robot, and the weapon was running on about 30-40% throttle for safety. This footage was taken through the polycarbonate lid of a test box, and we were standing back when the robot was moving. We also tested against the prototype chassis that we made, and it shattered one of the weapon mounts and hit it into the ceiling multiple times! It is clearly capable of giving out some big hits!
This means that we have a fully functioning robot to compete with at RoboDojo, even if we don't have the Hardox parts. The weight with all four mild steel forks is 1.474kg, 26g below the weight limit! My only goals for the event are: to win one fight, and to give something a really good hit, either launching it or causing a lot of damage.
We took all three of our robots to York for our second RoboDojo event. Exposure Exposure's first fight was against Percussive Maintenance XL. As the fight started, I got a good hit and flipped him over, however the belt once again snapped. This left me to be bullied around the arena for the rest of the match and the judges decision obviously went to PMXL. We rejoined the belt for hopefully the last time, and waited for the second fight. The second fight was a rematch against Little Grey Fergie. The fight started with me getting a good hit, then another, the another! The belt stayed on for the entire fight! I did have a bit of a scare when one of my wheel guard screws came loose and high-centred me, but I just managed to wiggle free and give a few more big hits before my opponent tapped out. The third fight was another rematch against Chucky, and like last time, I was bullied around the arena and pitted. However I was very happy that the robot managed to self right on the wea...
Our trip to Robodojo earlier this month highlighted a few issues that needed to be resolved. Most of these problems were to do with the weapon assembly, which had way too much flex and caused us to lose the weapon in our first fight. Also, the 3D printed parts were PLA at the event (uh oh) so they needed to be re-printed in TPU with a slight redesign for some parts. The fork mounts needed a way to stop the forks rotating under the robot like they did in York, and the weapon spacing needed to be increased. After looking at different companies that could print what we needed, we decided that it would be easier (and probably more cost efficient) if we bought our own 3D printer and TPU filament. This also opens up a lot of opportunities for printed antweight and beetleweight chassises. The first step for improving the weapon was to move the weapon bulkheads outwards and extend them backwards to the piece that separates the drive motors from the rest of the robot. We changed the ...
Because the Robodojo events have an antweight competition along with the beetleweights, we decided to make a couple of ants to take to the next event. These follow the same theme and colours as Exposure, but are a little less competitive and more of a chance to try new things and make robots that are fun to fight. However, I still wanted to make a spinner. So I thought for a long time about how I could make a spinner that would be entertaining, but not too serious, and I eventually settled on a 4WD large undercutter design. The plan was to make the chassis as small as possible but make the weapon as LARGE as possible. The actual chassis footprint is only about 80 x 65mm! This was printed in PLA+ with 2 walls and 30% infill, which feels nice and strong. It also runs on 3S LiPo because why not, and uses a 2700KV 1806 motor to power the weapon. This gives a theoretical tip speed of 319mph, or 34,000 rpm with the largest weapon. Also, due to the battery voltage, we couldn't use the ty...







{kind=link}
Comments
Post a Comment